In 2015 I won a PhD scholarship at Politecnico di Torino in Aerospace Engineering. My research focused on assessing the tractive performance of flexible wheels for lightweight planetary rovers using a 3D multibody-discrete element co-simulation framework. My PhD advisor was Professor Emeritus Giancarlo Genta.
Unfortunately, due to family and economic issues, in April 2019, after more than three years of research, I had to drop out of my PhD programme.
Since the beginning of my academic journey, I had to constantly travel back and forth to stay close to my family located in Northeast Italy. This situation became particularly tough to bear during my PhD, but I didn’t give up and moved forward. However, in 2018 the situation got worse and it became clear to me that I had to relocate back to my hometown. Moreover, my scholarship was about to expire and I had a student loan to pay back (and still have), so I looked for a job near home and got hired by Limacorporate, which is not so much into space robotics, nonetheless I managed to adapt to the needs of the biomedical industry. I started this job in September 2018 and, in the meantime, I continued to work remotely on my research at night and during weekends.
To be able to defend a PhD thesis, the Aerospace department required to attend a minimum number of hours of both technical and soft skills courses, to publish one paper in an international conference and one article in a top-tier journal. The latter was the issue. I managed to submit the paper to the Journal of Field Robotics in September 2018. You can download the submitted paper and raw data. Two reviewers didn’t accept the article mainly due to the sinkage results and asked me to improve the numerical model. For doing so I needed to perform additional experimental tests and run a new co-simulation campaign. At this point I was running out of time, so I asked my university for a deadline extension but the request was denied (the request is granted in case of pregnancy or severe health issues only). A few days before the final deadline I dropped out of the programme.
My research activity can be broken down as follows.
- Designing and building the single-wheel test bench. I inherited a test bench developed years earlier, but it featured several design mistakes that made it impossible to use it for testing wheels on soft soils; moreover, the bench didn’t allow to carry out tests at varying slip ratios. I kept the chassis and the linear guide, but I had to re-design and build all the other mechanical parts. Whenever possible I used off-the-shelf components to cut costs. The test bench was located at Verrès (Aosta).
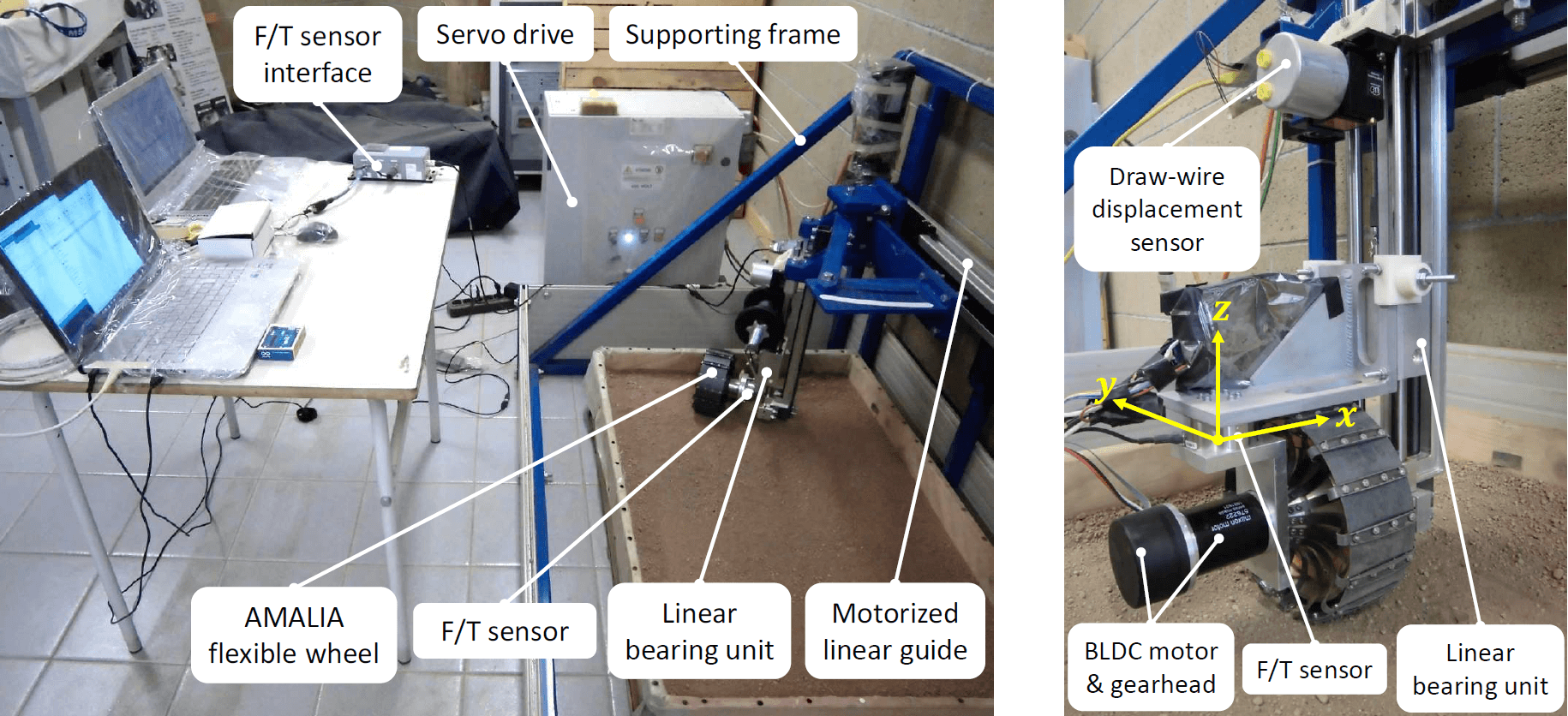 Left: Overview of the single wheel test bench in towing configuration. Right: Driving configuration.
Left: Overview of the single wheel test bench in towing configuration. Right: Driving configuration.
-
Testing the wheel. I performed several experimental tests on the elastic wheel of the AMALIA rover on a martian soil simulant at varying slip ratios. The soil was provided by ALTEC. I recorded force and torque data from the load cell, and sinkage data from a draw-wire displacement sensor. Videos of the experimental tests are available on my YouTube channel.
-
Testing the soil. The physical properties of the soil were investigated at the International Research School of Planetary Sciences. I had the opportunity to go there and to learn how soils are analyzed. Direct shear, triaxial and angle of repose tests were performed.
-
Implementation of a semi-empirical model. Based on Wong (2009), Ishigami (2011) and Favaedi (2011), I implemented in Matlab a semi-empirical model to predict the performance of flexible wheels.
-
Development of the EDEM/Adams co-simulation framework. The soil was modelled using the EDEM software for discrete element simulations, while the flexible wheel was modelled using the Adams software. The two software interacted with each other by running a co-simulation. Videos of the co-simulations are available on my YouTube channel.
-
Development of the multibody model of the flexible wheel. At that time, the EDEM/Adams co-simulation framework didn’t support flexible parts generated using, for instance, the component mode synthesis technique. Therefore, I mimicked the wheel flexibility by discretizing the rim with a number of segments, i.e. rigid bodies connected by revolute joints and rotational spring-dampers, and by replacing the radial circular beams with translational spring-dampers. I automated the construction of the multibody model of the wheel by writing a script using the Adams command language.
-
Calibration of the discrete element parameters. Reproducing the bulk behavior of the soil modelled as an assemblage of discrete particles required to accurately estimate a set of micro-scale input parameters, such as particle size, shape, Young’s modulus, etc. The approach I adopted was to carry out discrete element simulations of the direct shear and angle of repose tests and to iteratively changed the parameter values until the numerical model showed a macroscopic behavior comparable with the measured bulk response of the soil.
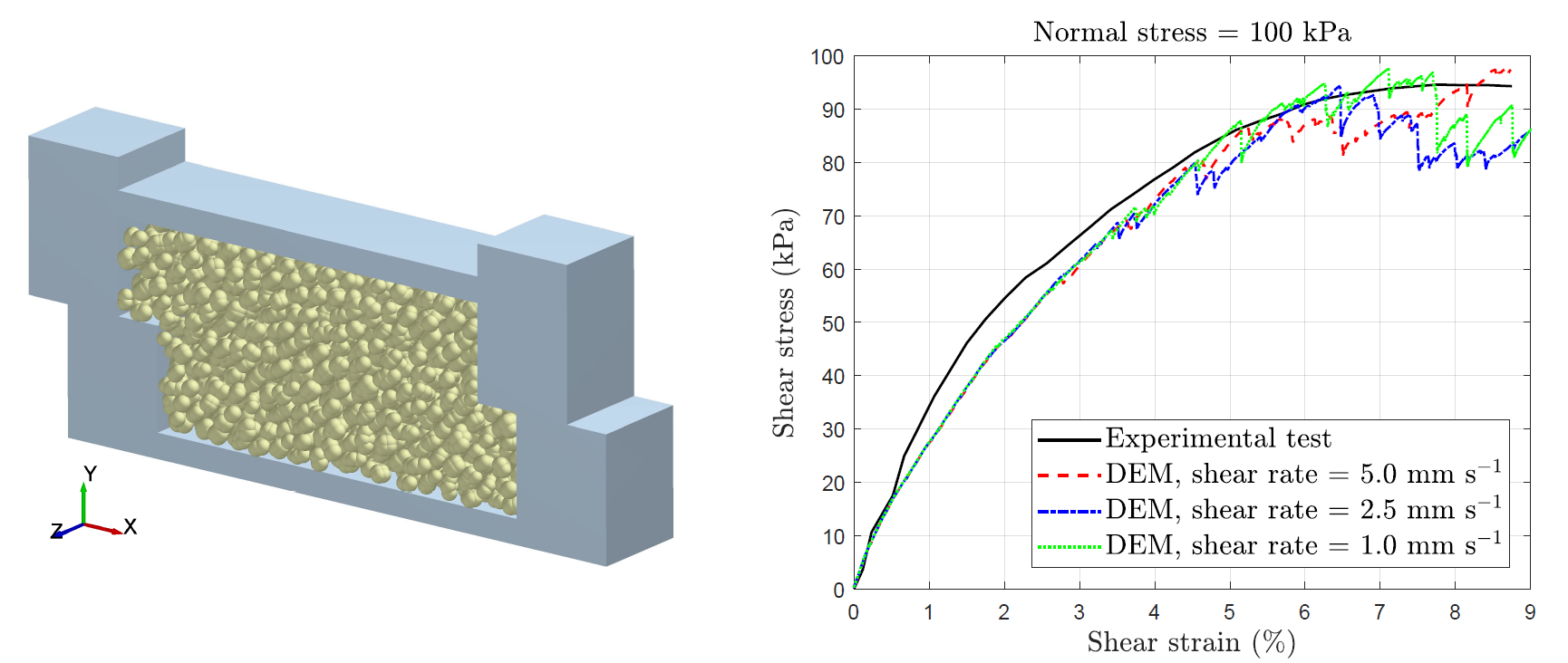 Left: Discrete element simulation of a direct shear test using 4-sphere clump subjected to a normal stress equal to 100 kPa. The static friction coefficient and the particle stiffness were set to 0.9 and 5.0e7 Pa respectively. Right: Comparison between experimental data and DEM results with varying shear rate.
Left: Discrete element simulation of a direct shear test using 4-sphere clump subjected to a normal stress equal to 100 kPa. The static friction coefficient and the particle stiffness were set to 0.9 and 5.0e7 Pa respectively. Right: Comparison between experimental data and DEM results with varying shear rate.
- Running the co-simulations. Once the discrete element parameters were estimated, the experimental single-wheel tests were repeated in the EDEM/Adams co-simulation environment. This step and the previous one were the most demanding and time consuming.
 EDEM/Adams co-simulation (the soil bed featured periodic boundaries).
EDEM/Adams co-simulation (the soil bed featured periodic boundaries).
- Comparing semi-empirical and numerical model results. Regarding the drawbar pull, the discrete element model showed good agreement with the experimental results, especially at low slips (0.0÷0.2). The semi-empirical model performed well at low slips but a discrepancy was evident at higher slips (0.4÷0.6). The discrete element model gave better approximation of the sinkage, with respect to the classical model, in particular at slips ranging from 0.4 to 0.6.
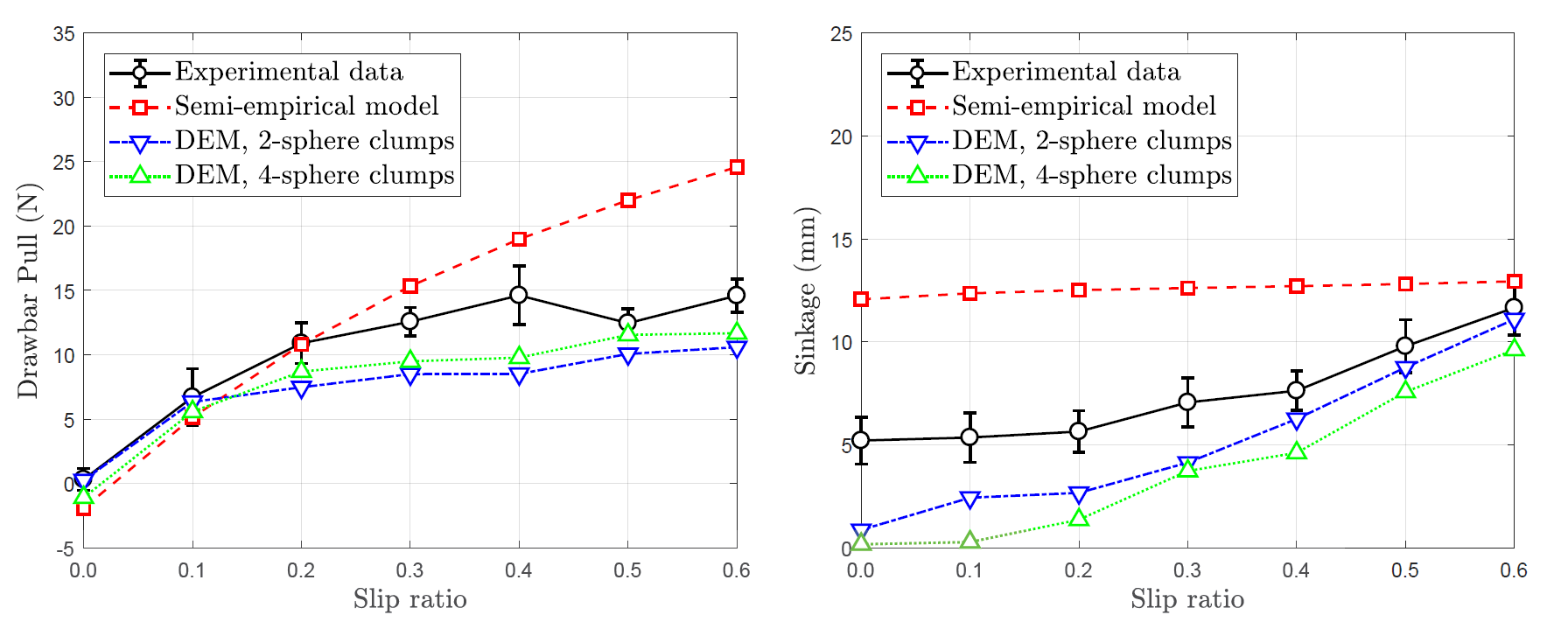 Left: Experimental drawbar pull, plotted as a function of the slip ratio, compared to the discrete element and semi-empirical results. Right: Experimental wheel sinkage, plotted as a function of the slip ratio, compared to the discrete element and semi-empirical results.
Left: Experimental drawbar pull, plotted as a function of the slip ratio, compared to the discrete element and semi-empirical results. Right: Experimental wheel sinkage, plotted as a function of the slip ratio, compared to the discrete element and semi-empirical results.
- Mobility simulation of the AMALIA and T0-R0 vehicles. Lastly, I used the methodology developed to simulate the wheel-soil interaction of the AMALIA and T0-R0 prototypes developed by Team DIANA. The analyses were published on the EDEM website. Finally, I have also designed a new elastic wheel called E3.
 EDEM/Adams co-simulation of the T0-R0 rover.
EDEM/Adams co-simulation of the T0-R0 rover.
 EDEM/Adams slip-steering co-simulation of the AMALIA rover.
EDEM/Adams slip-steering co-simulation of the AMALIA rover.
 EDEM/Adams co-simulation of the E3 wheel.
EDEM/Adams co-simulation of the E3 wheel.
That’s my research in a nutshell.
Looking back, maybe I shouldn’t have started a PhD programme given the situation I had to cope with, but honestly I can’t imagine myself giving up without trying. In addition, my career goal was to become a professor.
But for sure I am grateful for all the amazing people I have met and all the wonderful experiences I have enjoyed over the years at Politecnico di Torino.