Team DIANA is a space robotics group at Politecnico di Torino run by students. The group designs and manufactures prototypes of wheeled planetary rovers.
The acronym DIANA stands for Ducti Ingenio Accipimus Naturam Astrorum, which translates to guided by ingenuity, we understand [receive] the nature of the stars.
DIANA was born in 2008 and Professor Emeritus Giancarlo Genta was its academic advisor until 2018. Currently, the group is led by Professor Fabrizio Stesina; Leonardo Festa is the Team Leader, Alessandro Meloni is the Project Manager and Edoardo Vacchetto is the Assembly Integration and Test manager.
I joined the group in 2012 and I was promoted to team leader the following year. I led the team until 2015 when I got my MSc in Aerospace Engineering. During my PhD I continued to work with the team by mentoring younger students and providing support for the development of the prototypes. Even today, that I am no longer a student, I enjoy to keep in touch with the team and marvel at the progress made so far.
As team leader I had to manage tens of students coming from different countries and having diverse engineering backgrounds. I took care of recruitment and training activities, managed the budget and the network of suppliers and guided the development of the version 3.0 of the AMALIA prototype.
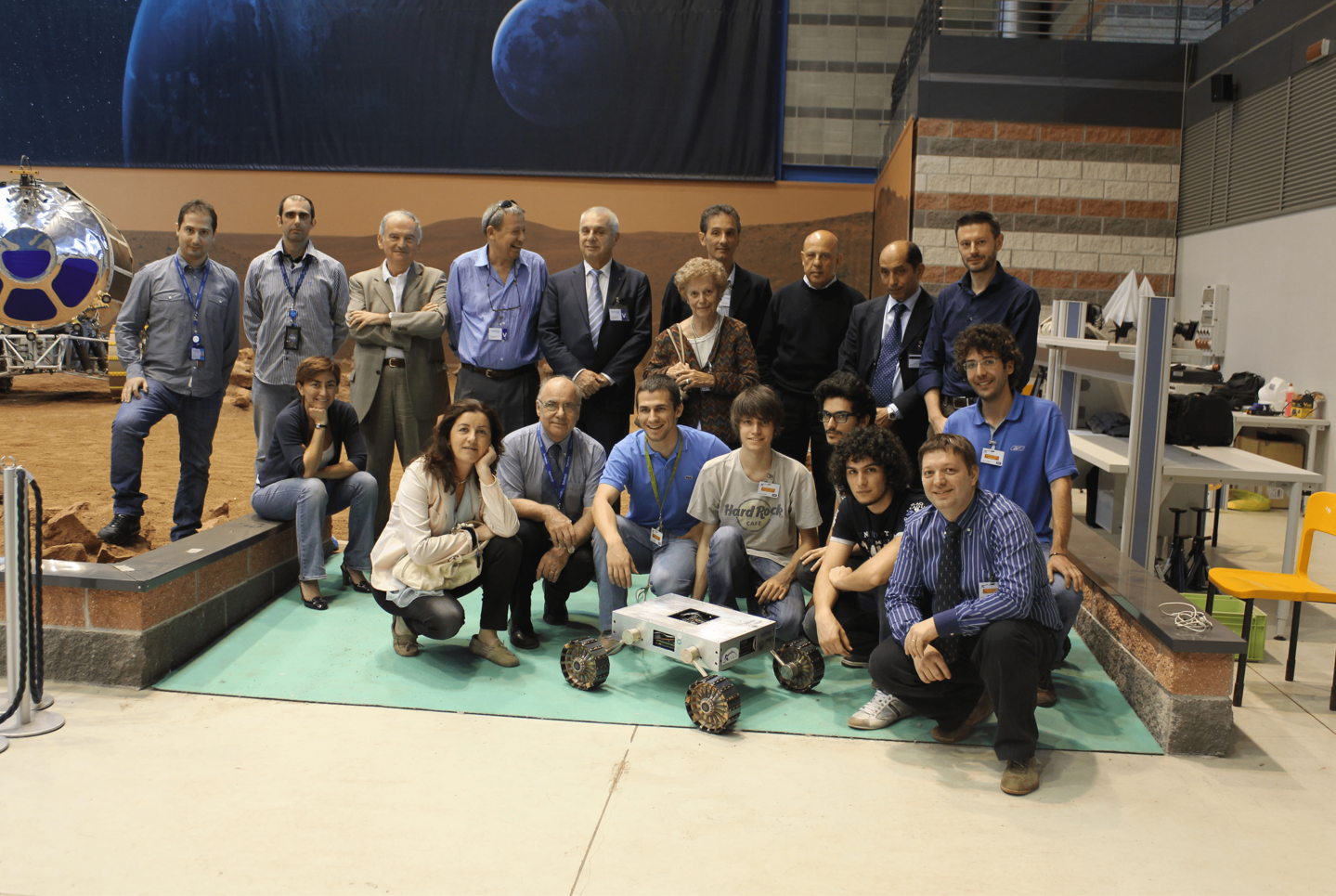
 Team DIANA in 2014.
Team DIANA in 2014.
From a technical standpoint, I focused on structural and multibody dynamics analyses of the mobility system using software like Patran/Nastran, Adams and Matlab/Simulink. In 2014 I started a fruitful collaboration with MSC Software that led to the development, for instance, of multibody analyses of the AMALIA 3.0 and T0-R0 prototypes. Videos of the simulations and co-simulations I performed are available on my YouTube channel.
 Multibody dynamics analysis of the T0-R0 prototype using MSC Adams.
Multibody dynamics analysis of the T0-R0 prototype using MSC Adams.
Today the team is doing better than ever developing new and more sophisticated vehicles and taking part in the European Rover Challenge, an international event where groups of students showcase their planetary rovers and compete with each other in a series of challenging tasks.
I would like to conclude this post with two image galleries. The first one shows all the prototypes developed by the team so far in chronological order.
 2010 - AMALIA 1.0
2010 - AMALIA 1.0
 2011 - AMALIA 2.0
2011 - AMALIA 2.0
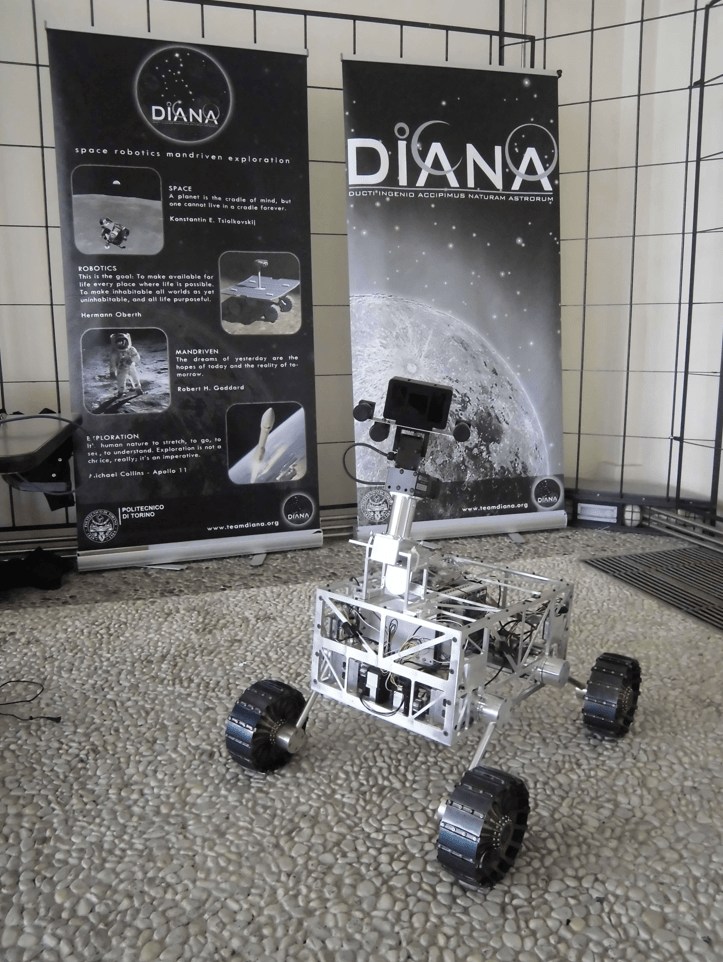
 2012 - AMALIA 2.1
2012 - AMALIA 2.1
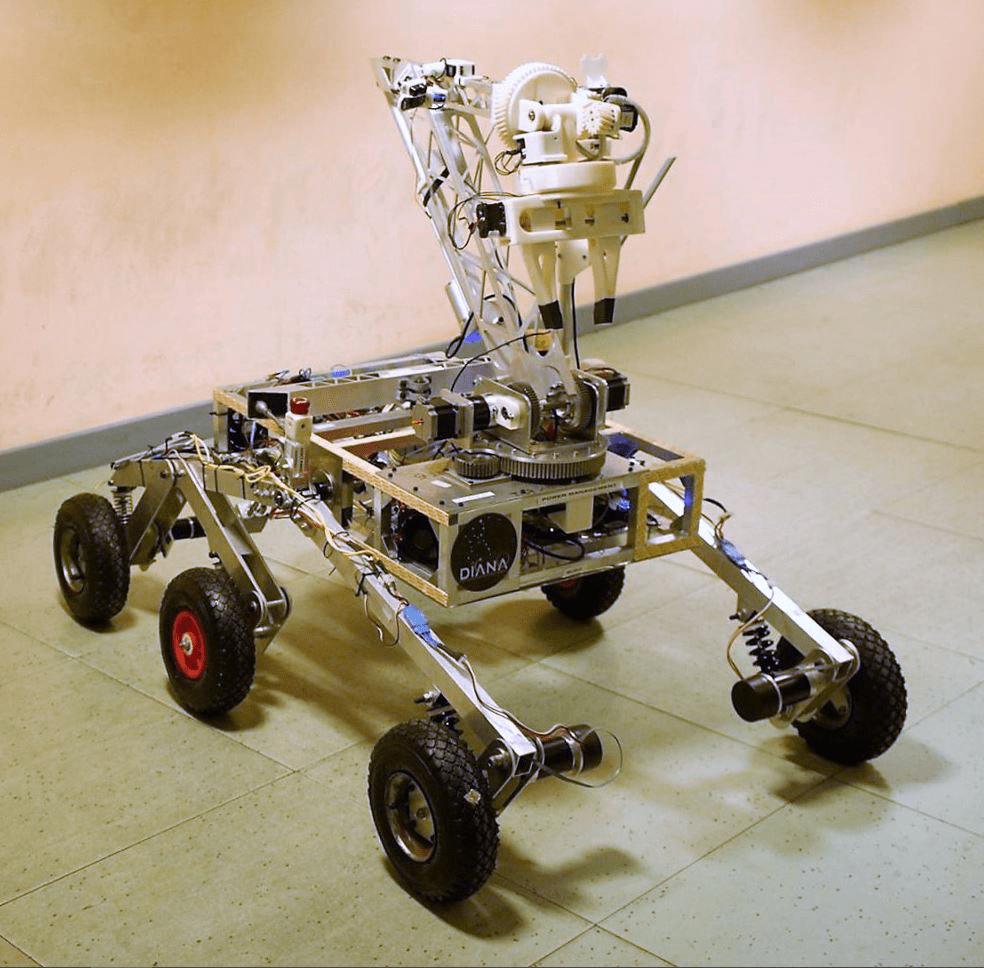
 2014 - AMALIA 3.0
2014 - AMALIA 3.0
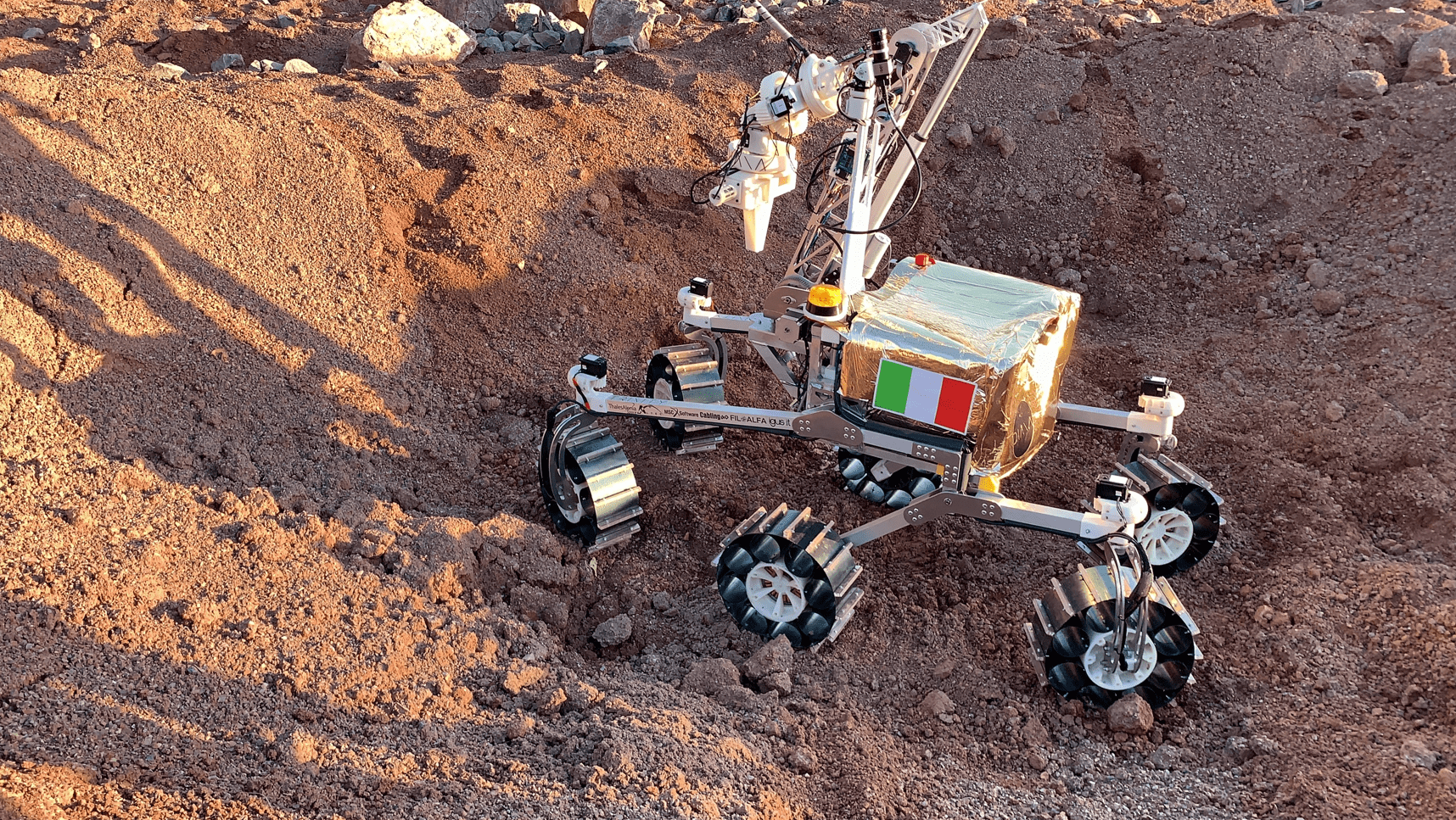
 2016 - T0-R0
2016 - T0-R0
 2018 - Trinity
2018 - Trinity
 2019 - Ardito
2019 - Ardito
The second one is a collection of pictures taken over the years.
 2010 - Cristoforetti
2010 - Cristoforetti
 2011 - Altec
2011 - Altec
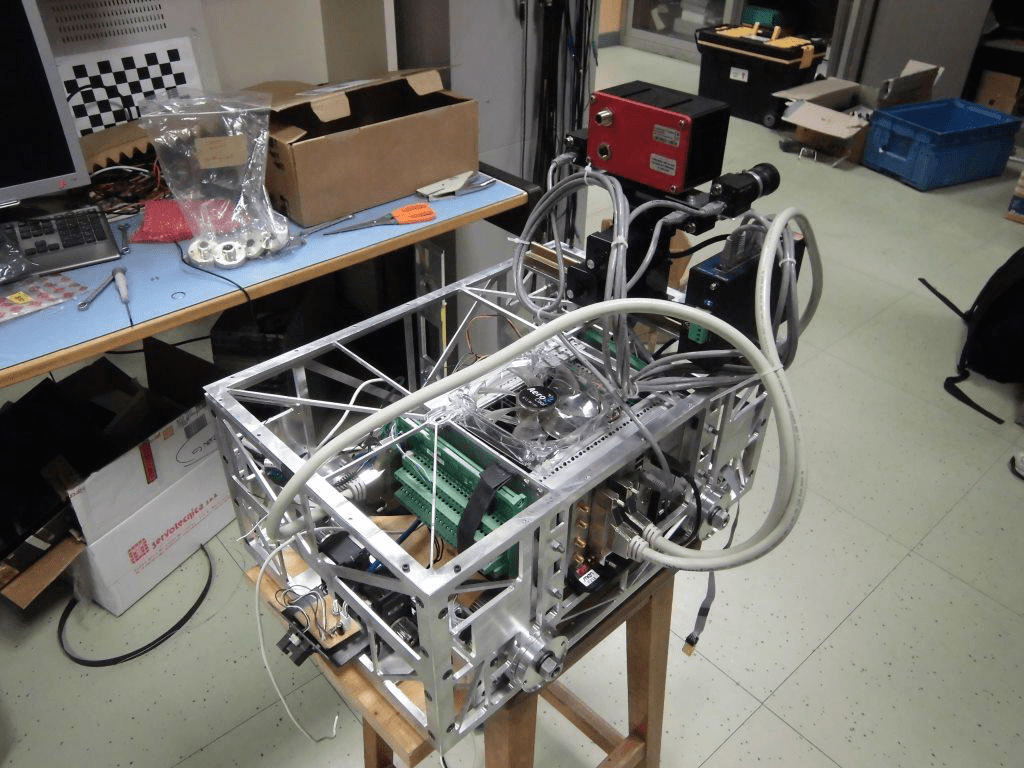
 2012 - AMALIA 2.1
2012 - AMALIA 2.1
 2012 - Altec
2012 - Altec
 2012 - Bellutta JPL
2012 - Bellutta JPL
 2012 - Wired
2012 - Wired
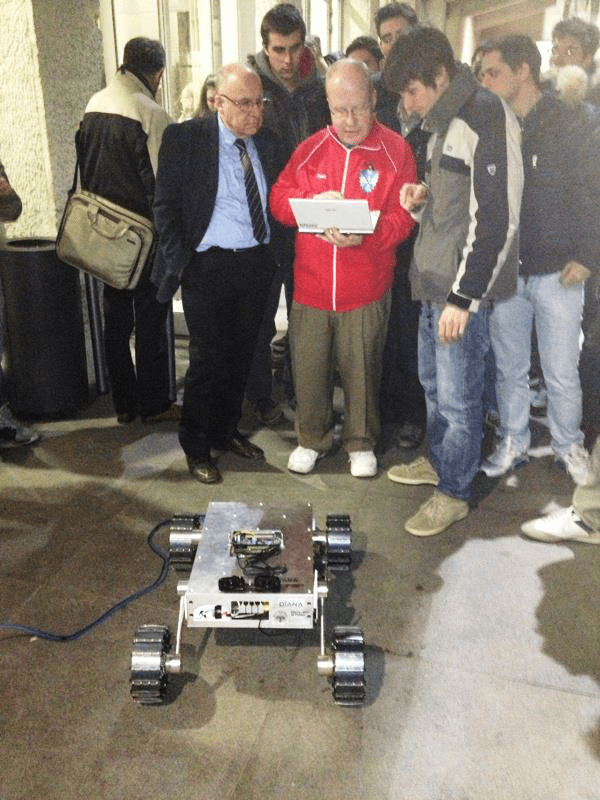
 2013 - Automotoretrò
2013 - Automotoretrò
 2013 - Lab
2013 - Lab
 2014 - AMALIA v3.0
2014 - AMALIA v3.0
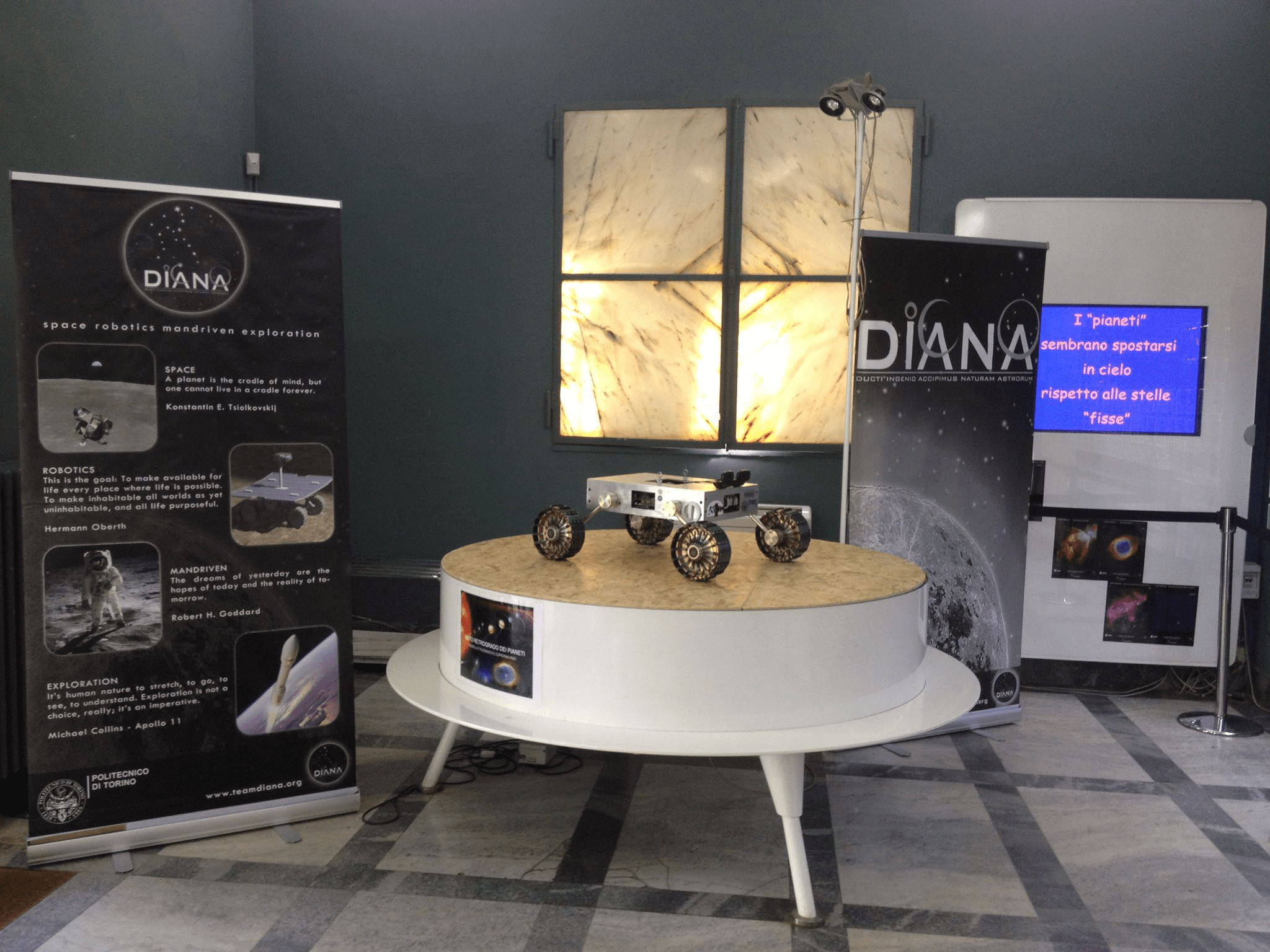
 2014 - AstronautiCON
2014 - AstronautiCON
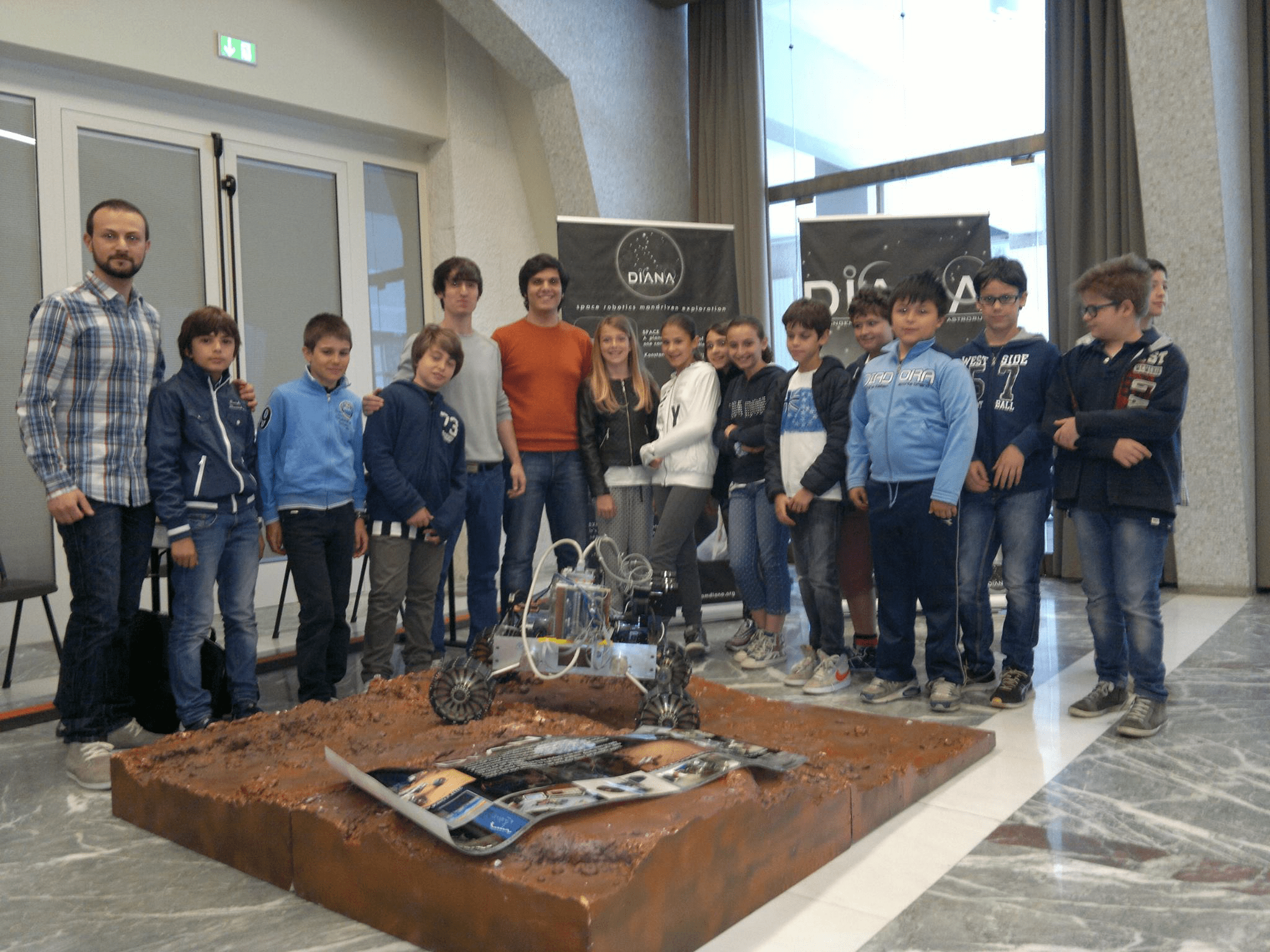 2014 - Bambini all'Università
2014 - Bambini all'Università
 2014 - General Motors
2014 - General Motors
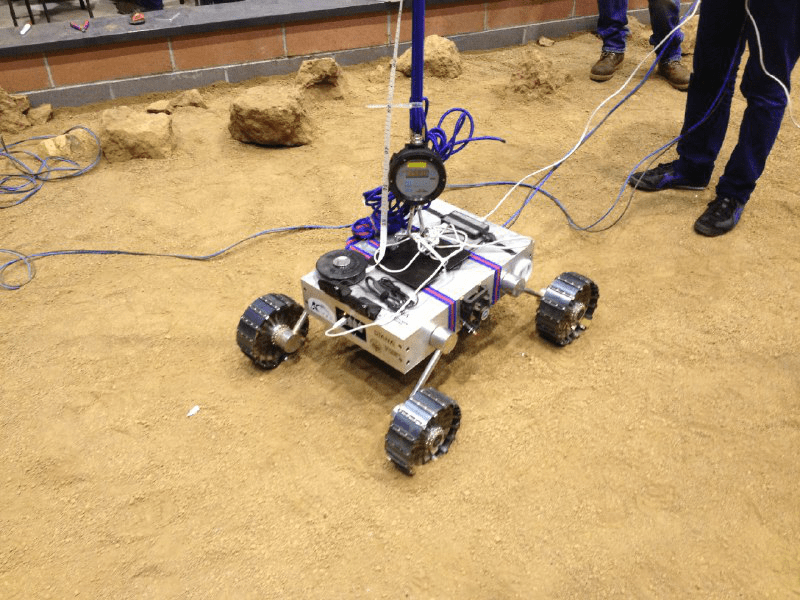
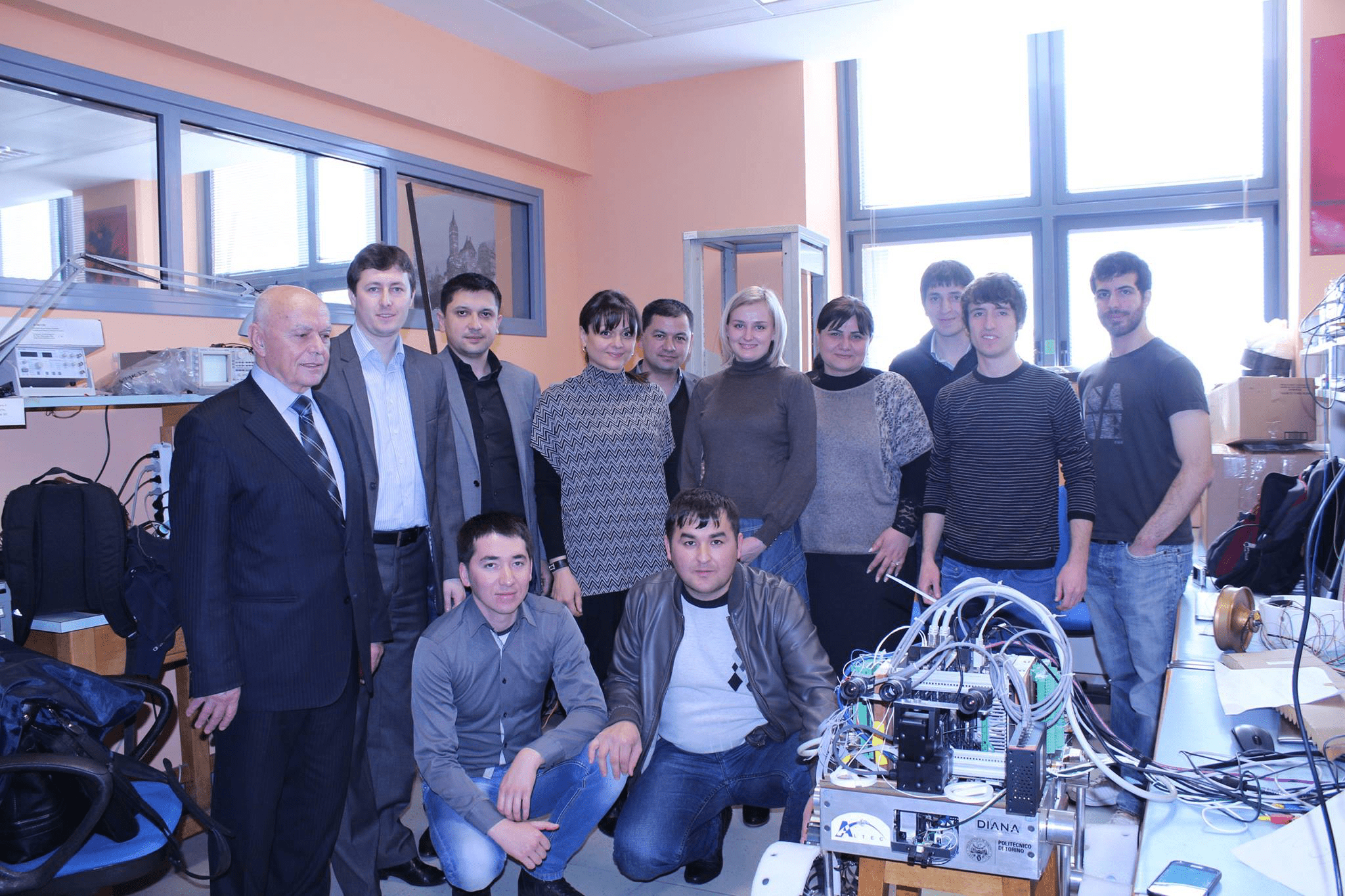 2014 - Georgia
2014 - Georgia
 2014 - Lab
2014 - Lab
 2014 - Radio OndeQuadre
2014 - Radio OndeQuadre
 2014 - Team DIANA
2014 - Team DIANA
 2015 - Automotive Technology Forum
2015 - Automotive Technology Forum
 2018 - T0-R0 - ERC
2018 - T0-R0 - ERC
 2019 - Nespoli
2019 - Nespoli
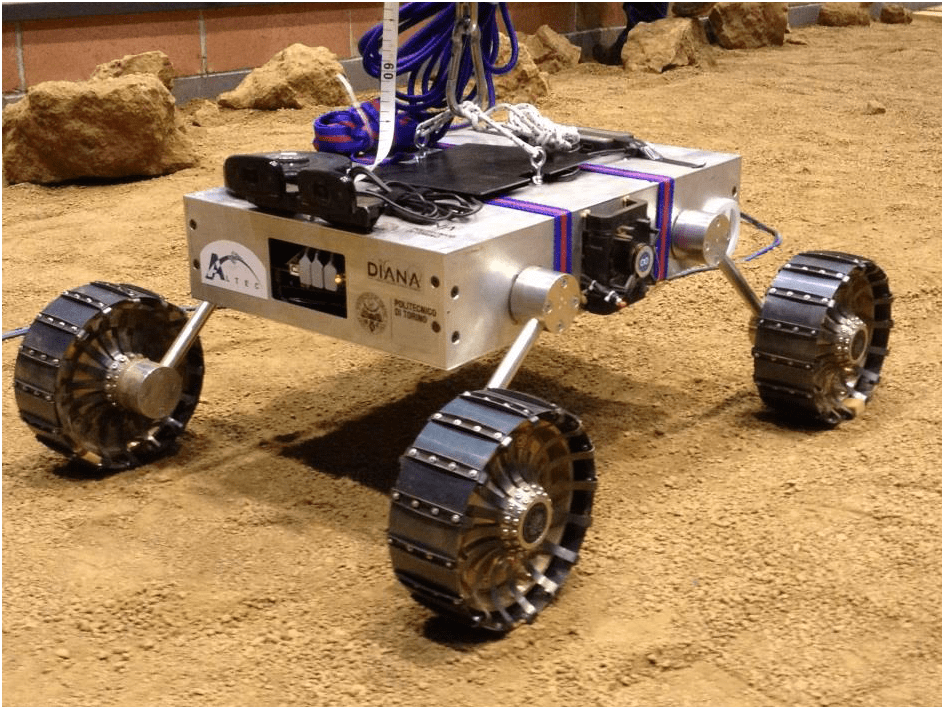
 2019 - T0-R0 - Nespoli
2019 - T0-R0 - Nespoli
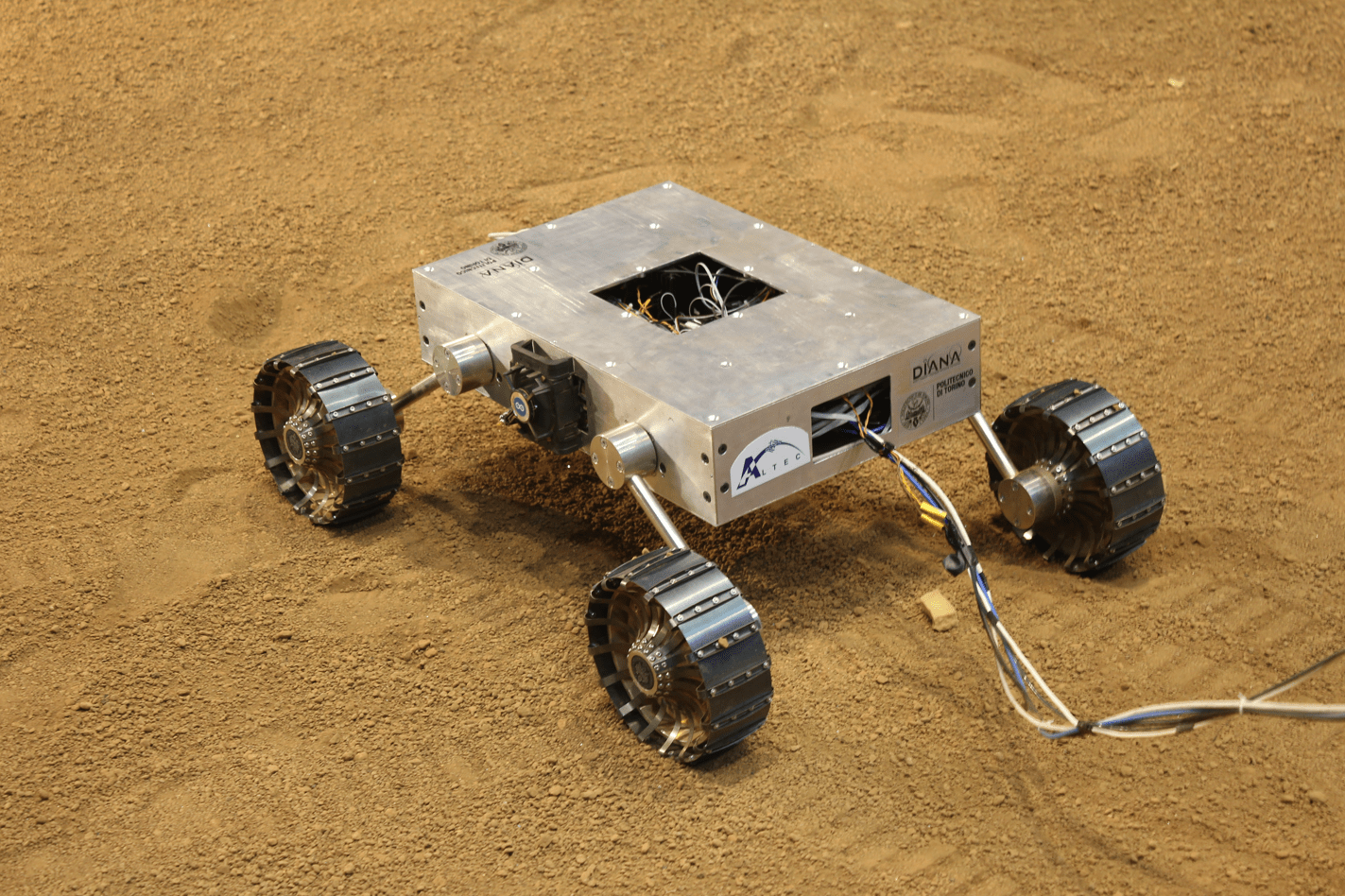
 2019 - T0-R0
2019 - T0-R0
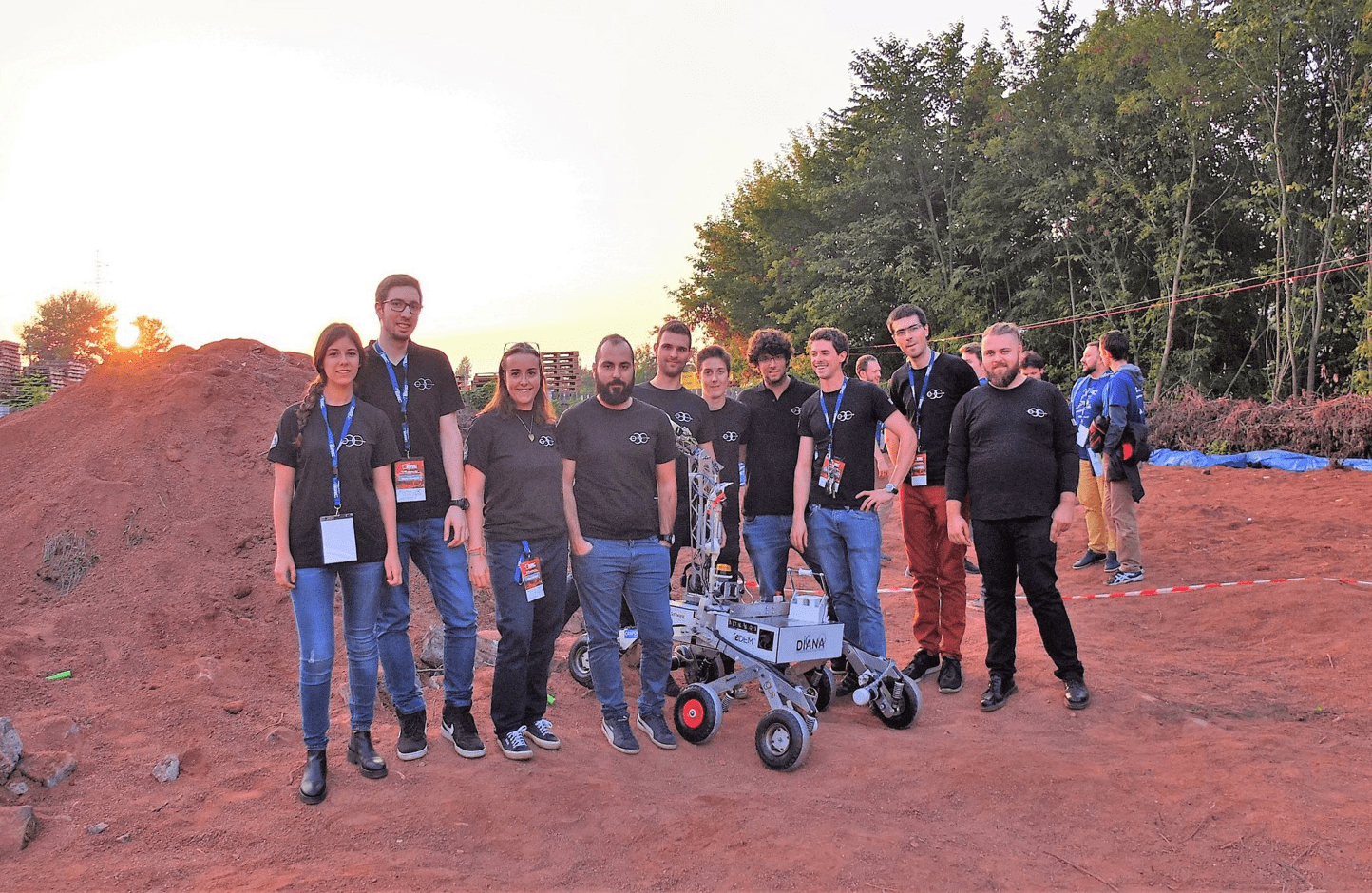
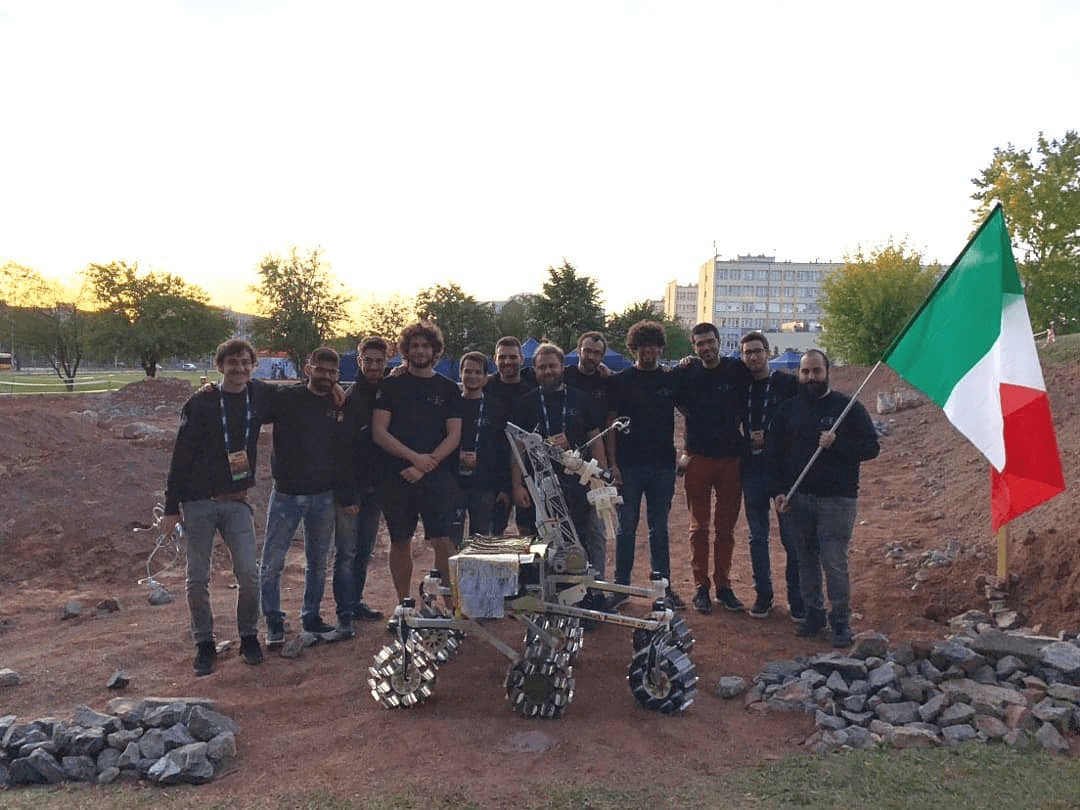 2019 - Trinity - ERC
2019 - Trinity - ERC
 2021 - Ardito - ERC
2021 - Ardito - ERC
 2022 - Ardito
2022 - Ardito
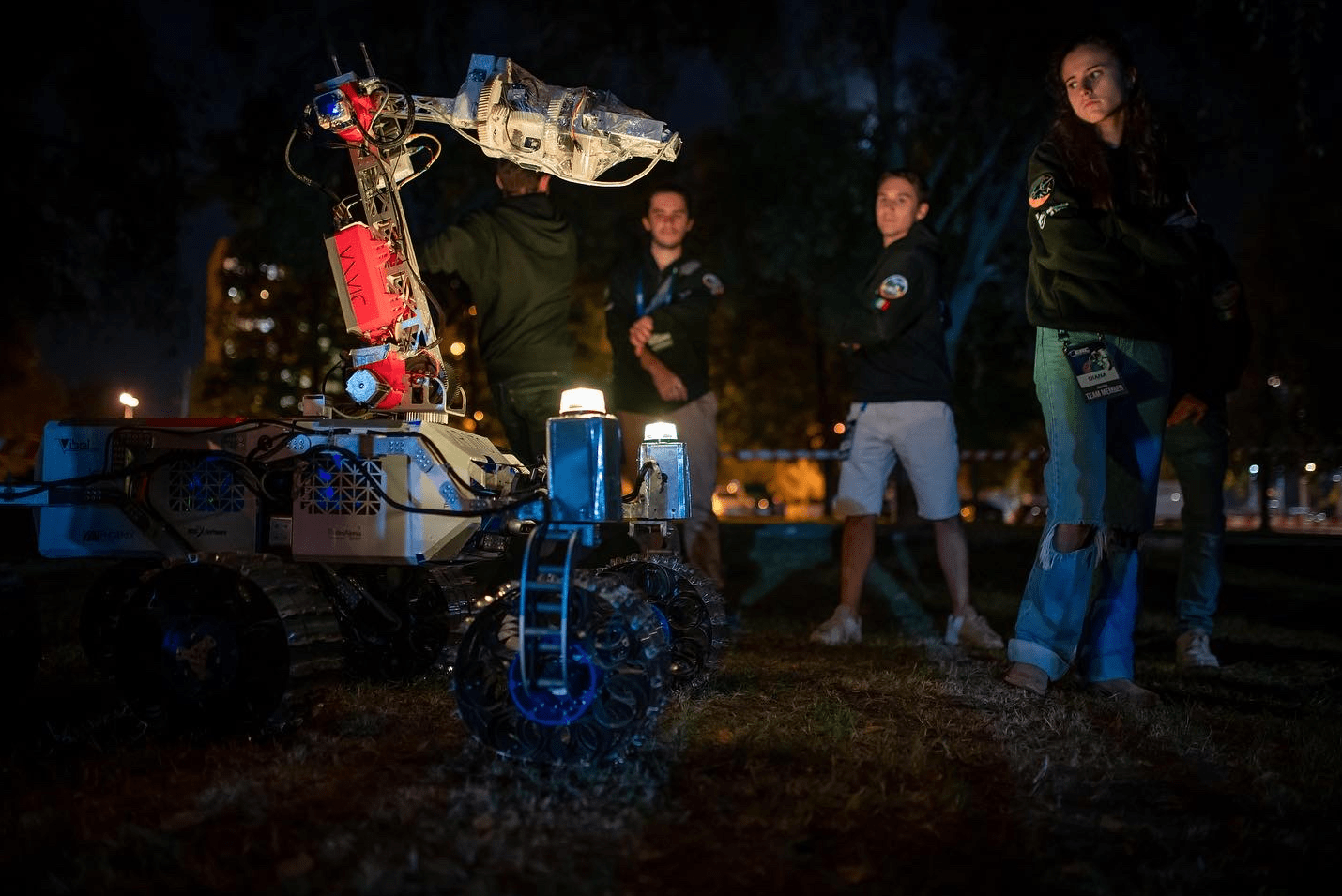 2022 - Ardito - Details - ERC
2022 - Ardito - Details - ERC
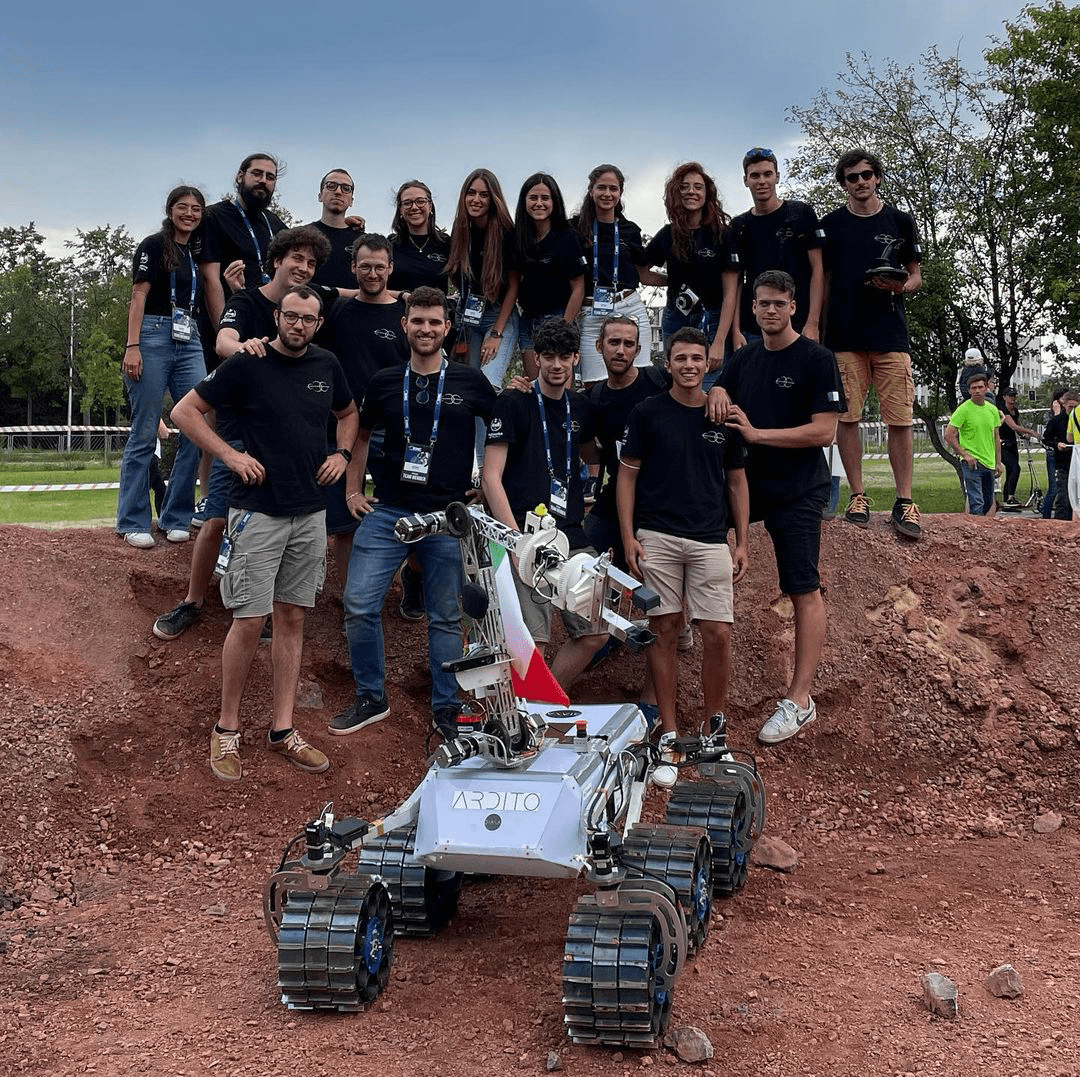
 2022 - Team - ERC
2022 - Team - ERC
If you want to know more about the team, take a look at its YouTube channel and Instagram/Facebook pages.